Criterio de Estabilidad de Bode A continuación se indican las condiciones de estabilidad: Para el sistema estable: Ambos márgenes deben ser positivos o el margen de fase debe ser mayor que el margen de ganancia. Para el Sistema Marginal Estable: Ambos márgenes deben ser cero o el margen de fase debe ser igual al margen de ganancia. Para el Sistema Inestable: Si alguno de ellos es negativo o margen de fase debería ser menor que el margen de ganancia. Ganancia de margen Cuanto mayor sea el Ganancia de margen (GM), mayor será la estabilidad del sistema. El margen de ganancia se refiere a la cantidad de ganancia, la cual puede ser aumentada o disminuida sin hacer el sistema inestable. Se suele expresar como una magnitud en dB. Por lo general, podemos leer el margen de ganancia directamente del gráfico de Bode (como se muestra en el diagrama anterior). Esto se hace calculando la distancia vertical entre la curva de magnitud (en el gráfico de magnitud de Bode) y el eje x en la frecuencia don...
Polos y ceros de una función de transferencia. G(s) = Salida / Entrada = Q(S) / P(s) G(s)= Polinomio salida / Polinomio entrada La función de transferencia G(s) de un sistema lineal invariante en el tiempo, puede expresarse como el cociente de dos polinomios en "s". Si ahora se expresa a G(s) como el producto de los factores lineales que incluyen a esas raices, la ecuación se convierte en: Entonces, ¿Qué son los ceros en un sistema? El valor(es) para z donde el numerador de la función de trasferencia es igual a cero Las frecuencias complejas que hacen que la ganancia de la función de transferencia del filtro sea cero. En cuanto a los ceros, suele decirse que, si el sistema es excitado con una señal que contenga la frecuencia de alguno de los ceros, la salida será nula. Sin embargo, esto no es completamente cierto ya que la s...
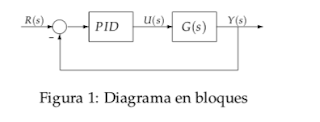
3.2 TIPOS DE CONTROLADORES P, PI Y PID Introducción En este capítulo veremos la familia de controladores PID, que mostraron ser robustos en muchas aplicaciones y son los que más se utilizan en la industria. La estructura de un controlador PID es simple, aunque su simpleza es también su debilidad, dado que limita el rango de plantas donde pueden controlar en forma satisfactoria (existe un grupo de plantas inestables que no pueden estabilizadas con ningún miembro de la familia PID). En este capítulo estudiaremos los enfoques tradicionales al diseño de controladores PID. Estructura del PID Consideremos un lazo de control de una entrada y una salida (SISO) de un grado de libertad Los miembros de la familia de controladores PID, incluyen tres acciones: proporcional (P), integral (I) y derivativa (D). Estos controladores son los denominados P, I, PI, PD y PID. • P acción de control proporcional, ...


Comentarios
Publicar un comentario