5.7 Diseño de observadores
5.7 Diseño de observadores
Un observador de estados es un sistema dinámico cuyos estados convergen a los del sistema observado. Dependiendo del numero de estados observados, el observador es de orden completo o reducido. Luego puede implementarse un control con asignación de autovalores de lazo cerrado por realimentación de los estados observados
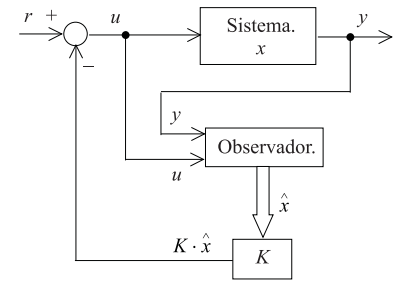
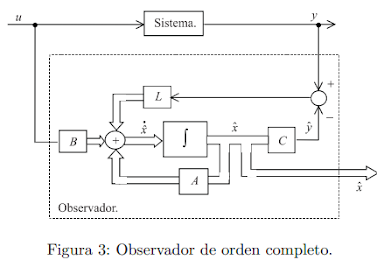
Observador de Orden completo
Consideremos que se desea estimar los estados x de un sistema lineal
siendo las matrices A, B y C son conocidas. Se propone la siguiente estructura genérica para el
observador
donde las matrices Ao y L deben ser diseñadas para cumplir el objetivo de forzar la convergencia
de los estados del observador a los del sistema. Por otra parte, z es una señal a determinar,
si bien aun no es conocida es razonable pensar que dependa de la excitación u del sistema a
observar.
La dinámica del error definido por la diferencia entre los estados del sistema y los estados del
observador resulta de la diferencia entre las ecuaciones:
Para asegurar que el error e = x − x converja a cero, mas allá de la excitación u del sistema, de
su salida y y del valor inicial del error e(0), la ecuación debería poder reducirse a:
donde los autovalores de la matriz A˜ deben pertenecer al semiplano izquierdo. Esta reducción
es posible si:
Luego el diseño del observador se reduce a encontrar una matriz L que asigne sus autovalores
en:
- El semiplano izquierdo, lo cual asegura la estabilidad del observador,
- Y a la izquierda de los autovalores del sistema para asegurar que la dinámica del error e = Aoe sea más rápida que la del sistema. ¿Por que?

Referencias
- Ogata, K. (1996). Sistemas de control en tiempo discreto. Pearson educación.
- Giraldo, D., & Giraldo, E. (2007). Control por realimentación de variables de estado usando un observador adaptativo de estados. Scientia et technica, 1(35).


Comentarios
Publicar un comentario