2.5 Tipos de sistemas y error de estado estacionario y dinámico
2.5 Tipos de sistemas y error de estado estacionario y dinámico
2.5.1 TIPOS DE SISTEMAS
Los sistemas de regulación y control se clasifican en dos tipos:
Sistemas de control en lazo abierto.
Sistemas de control en lazo cerrado.
Sistema de control en lazo o bucle abierto:
En ellos la señal de salida no influye sobre la señal de entrada.
La exactitud de estos sistemas depende de su programación previa. Es preciso prever las relaciones que deben darse entre los diferentes componentes del sistema, a fin de tratar de conseguir que la salida alcance el valor deseado con la exactitud prevista.
El diagrama de bloque de un sistema en lazo abierto es:

Una característica importante de los sistemas de lazo abierto es que dependen de la variable tiempo y la salida es independiente de la entrada.
Los sistemas en bucle abierto tienen el inconveniente de ser muy sensibles a las perturbaciones
sistemas de control en lazo cerrado:
En ellos, la señal de salida influye en la entrada. Esto se consigue mediante un proceso de realimentación (feedback).
La realimentación es la propiedad de un sistema en lazo cerrado por la cual la salida (o cualquier otra variable controlada) es comparada con la entrada del sistema, de forma que el proceso de control depende de ambas.
En estos sistemas un transductor mide en cada instante el valor de la señal de salida y proporciona un valor proporcional a dicha señal.
Este valor relacionado con la señal de salida, se realimenta al sistema, de forma que ésta influye directamente sobre el proceso de control.
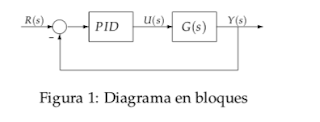
El diagrama de bloques correspondiente a un sistema de control en lazo cerrado es:

Si la señal de error fuese nula, entonces la salida tendría exactamente el valor previsto.
De no ser nula, ésta ataca al controlador o regulador, donde es convenientemente amplificada si fuera necesario, convirtiéndose en la señal activa, capaz de activar al actuador, para que la salida alcance el valor previsto.
2.5.2 ANALISIS DE ERROR
ERROR ESTACIONARIO Y ERROR DINAMICO
Error estacionario: es la diferencia entre las señales de entrada y salida durante el período estacionario o permanente, se estudia en el campo complejo ya que se dispone de las transferencias, para ello se utiliza el teorema del valor final.
Coeficientes de error estático: Los coeficientes de error estático son factores de mérito, cuanto mayores son mejor es el sistema respecto del error estacionario.
Error dinámico: es la diferencia entre las señales de entrada y salida durante el período transitorio, es decir el tiempo que tarda la señal de respuesta en establecerse. para estudiar este tipo de respuesta se utilizan señales de prueba
2.5.2.1 COEFICIENTES ESTATICOS DE ERROR
Si definimos coeficientes de error estático a los recíprocos de “ess” la tabla anterior queda:

Los coeficientes de error estático son factores de mérito , cuanto mayores son mejor es el sistema respecto del error estacionario.
La definición de coeficiente de error así presentada es un tanto descolgada, pero un rápido análisis quizás arroje un poco de luz
Si la entrada es escalón:

El coeficiente de error estacionario será:

Se llama “error estático de posición” al valor kp.
Si la entrada es una rampa unitaria:

Si la entrada es parabólica:

En definitiva los coeficientes kp, kv y ka son coeficientes de mérito sobre el comportamiento del sistema. Por ejemplo, se ve claramente que disminuir el error de un sistema tipo cero realimentado y bajo una entrada escalón se debe aumentar la ganancia kp. Cabe aclarar que ese aumento se verá en general limitado por la pérdida en cuanto a estabilidad del sistema.
Para sistemas tipo uno ó superiores es decir con la introducción de
integradores en ¨G.H¨ ess resulta nulo.
Se puede efectuar un análisis similar con respecto a otros sistemas sometidos a distintas entradas de prueba, el lector puede realizar este tipo de análisis utilizando las tablas 2.a y 2.b; reemplazando el valor de k por kp, kv ó ka según corresponda.
2.5.2.2 ERROR DE ESTADO ESTACIONARIO
Error estacionario: es la diferencia entre las señales de entrada y salida durante el período estacionario o permanente, se lo estudia en el campo complejo ya que se dispone de las transferencias, para ello se utiliza el teorema del valor final. Sea e(t) la función error, se define el error estacionario como:
hora analizaremos la transferencia de un sistema de control de lazo cerrado obteniendo una expresión de la transformada del error E(s); como el error estacionario depende del “tipo de función de transferencia de lazo abierto G.H”, supondremos que G.H posee una forma determinada, por último para distintos tipos de entradas calcularemos el error estacionario (utilizando el teorema del valor final).

2.5.2.3 COEFICIENTES DE ERROR DINÁMICO
Es la diferencia entre las señales de entrada y salida durante el período transitorio, es decir el tiempo que tarda la señal de respuesta en establecerse.
La respuesta de un sistema en régimen transitorio se analizará al final de este capítulo; por ahora sólo diremos que para estudiar este tipo de respuesta se utilizan señales de prueba, el siguiente cuadro muestra las transformadas de “Laplace” de las mismas:

El siguiente gráfico muestra la respuesta de un sistema ante una entrada escalón y el error así generado:

2.5.3 CRITERIOS DE ERROR
Permiten evaluar el comportamiento de los sistemas y son la base para optimizarlos respecto al comportamiento de su error.
Los principales criterios utilizados para la optimización de sistemas de control son:
Integral de error absoluto: se representa la evolución de error y la salida del sistema ante una entrada tipo escalón en el valor deseado

Sus características son:
- De muy fácil aplicación.
- No se pueden optimizar sistemas altamente sub ni altamente sobre amortiguados.
- Difícil de evaluar analíticamente
Criterio integral del error cuadrático: Este criterio da mayor importancia a los errores grandes, pero da poco peso a los errores pequeños.

Las principales características son:
- Se da mayor importancia a los errores grandes.
- No es un criterio muy selectivo.
Criterio de error cuadrático integral por el tiempo, (CECIT).
La integral es:

Se caracteriza por:
- Los grandes errores iniciales tienen poco peso pero los que se producen más tarde son fuertemente penados.
- Mejor selectividad con respecto a CECI. respuesta rápida pero oscilatoria, estabilidad relativa pobre.
Los criterios se utilizan en la optimización de sistemas para lo que hay que considerar algún parámetro respecto del cual se pueda operar. Por ejemplo si como resultado de la integral del correspondiente criterio aparece el valor del factor de amortiguamiento o bien algo que influya sobre él como por ej. la ganancia, derivaremos respecto del mismo hallando el mínimo para disminuir el error según ese criterio hasta el óptimo.
2.5.4 INTRODUCCIÓN A LA OPTIMIZACIÓN DE SISTEMAS
Requerimientos generales de un sistema de control:
Estabilidad: Necesariamente, un sistema debe ser estable, esto significa que la respuesta a una señal, ya sea el cambio del punto de referencia a una perturbación, debe alcanzar y mantener un valor útil durante un período razonable.
Exactitud: Un sistema de control debe ser exacto dentro de ciertos límites especificados, esto significa que el sistema debe ser capaz de reducir cualquier error a un límite aceptable
Rapidez de respuesta: Es la cualidad que debe tener un Sistema de control para que funcione a tiempo. Un sistema de control debe completar su respuesta a una señal de entrada en un tiempo aceptable
De manera alternativa un sistema se puede definir como estable si al estar sujeto a una entrada impulso la salida tiende a cero a medida que el tiempo tiende a infinito.


Comentarios
Publicar un comentario