5 Sistemas de control en espacio de estado
5.1 Introducción
Los sistemas de control en espacio de estado son la representación moderna que se tiene para describir el comportamiento de los sistemas dinámicos empleados en diferentes áreas de la ingeniería, como ingeniería electrónica, mecánica, química, mecatrónica o control. Donde las variables de estado en un sistema de control son:- Espacio de estado es una forma de representar un sistema dinámico en función de n ecuaciones en diferencia
- Variables de Estado: son el conjunto más pequeño de variables que determina el comportamiento dinámico de un sistema.
Cuando se representa un modelo mediante el sistema en espacio de estado la entrada del sistema puede ser un conjunto de señales que comandan el comportamiento del sistema, las salidas del sistema puede estar conformado por un conjunto de respuestas a las entradas. Así, internamente, podríamos decir que el sistema o el modelo está conformado por unas variables de estado.
con lo anteriormente mencionado se puede obtener que

para complementar la información sobre las variables de estado se presentara un video obtenido de YouTube el cual explica de manera clara lo que son estas variables así como su uso y funciones que se pueden aplicar en los sistemas de control.
5.2 Conversión entre función de transferencia y espacio de estado
Representaciones en el espacio de estados de sistemas definidos por su función de transferencia
Existen muchas técnicas para obtener representaciones en el espacio de estados de sistemas definidos por su función de transferencia.Representación en el espacio de estados en formas canónicas.
Considérese un sistema definido mediante:
presentan las representaciones en el espacio de estados del sistema definido en su forma canónica controlable, en su forma canónica observable y en su forma canónica diagonal.
Forma canónica controlable. La siguiente representación en el espacio de estados se denomina forma canónica controlable:

La forma canónica controlable es importante cuando se analiza el método de asignación de polos para el diseño de sistemas de control.
Forma canónica observable. La siguiente representación en el espacio de estados se denomina forma canónica observable:

Forma canónica diagonal. La forma canónica diagonal de la representación en el espacio de estados de este sistema viene dada por:

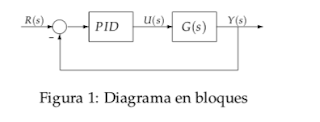
Consideremos la forma general de la representación de espacio de estados, la cual es también equivalente a tener una función de transferencia G(s).
𝑥̇(𝑡) = 𝐴𝑥(𝑡) + 𝐵𝑢(𝑡) (1)
𝑦(𝑡) = 𝐶𝑥(𝑡) + 𝐷𝑢(𝑡) (2)
Primero tenemos que cambiar dicha representación del dominio del tiempo al dominio de Laplace. Es posible realizar la transformación de este sistema expresado como ecuaciones de estado a una representación de función de transferencia por medio de un procedimiento simple.
Consideremos el sistema dado por las ecuaciones (1) y (2) y expresemos las variables en el dominio de Laplace
𝑓{𝑥̇(𝑡) = 𝐴𝑥(𝑡) + 𝐵𝑢(𝑡)} (3)
𝑠𝑋(𝑠) − 𝑥(0) = 𝐴𝑋(𝑠) + 𝐵𝑈(𝑠) (4)
Así se llega a:
𝑓{𝑦(𝑡) = 𝐶𝑥(𝑡) + 𝐷𝑢(𝑡)} (5)
𝑌(𝑠) = 𝐶𝑋(𝑠) + 𝐷𝑈(𝑠) (6)
De esto obtenemos:
(𝑠𝐼 − 𝐴)𝑋(𝑠) = 𝐵𝑈(𝑠) + 𝑥(0) (7)
𝑋(𝑠) = (𝑠𝐼 − 𝐴)−1𝐵𝑈(𝑠) + (𝑠𝐼 − 𝐴)−1𝑥(0) (8)
𝑥̇(𝑡) = 𝐴𝑥(𝑡) + 𝐵𝑢(𝑡) (1)
𝑦(𝑡) = 𝐶𝑥(𝑡) + 𝐷𝑢(𝑡) (2)
Primero tenemos que cambiar dicha representación del dominio del tiempo al dominio de Laplace. Es posible realizar la transformación de este sistema expresado como ecuaciones de estado a una representación de función de transferencia por medio de un procedimiento simple.
Consideremos el sistema dado por las ecuaciones (1) y (2) y expresemos las variables en el dominio de Laplace
𝑓{𝑥̇(𝑡) = 𝐴𝑥(𝑡) + 𝐵𝑢(𝑡)} (3)
𝑠𝑋(𝑠) − 𝑥(0) = 𝐴𝑋(𝑠) + 𝐵𝑈(𝑠) (4)
Así se llega a:
𝑓{𝑦(𝑡) = 𝐶𝑥(𝑡) + 𝐷𝑢(𝑡)} (5)
𝑌(𝑠) = 𝐶𝑋(𝑠) + 𝐷𝑈(𝑠) (6)
De esto obtenemos:
(𝑠𝐼 − 𝐴)𝑋(𝑠) = 𝐵𝑈(𝑠) + 𝑥(0) (7)
𝑋(𝑠) = (𝑠𝐼 − 𝐴)−1𝐵𝑈(𝑠) + (𝑠𝐼 − 𝐴)−1𝑥(0) (8)
Además:
𝑌(𝑠) = [𝐶(𝑠𝐼 − 𝐴)−1𝐵 + 𝐷]𝑈(𝑠) + 𝐶(𝑠𝐼 − 𝐴)−1𝑥(0) (9)
De esta ecuación, vemos que el primero término representa la función de transferencia.
𝐺(𝑠) = 𝑌(𝑠)/𝑈(𝑠) = 𝐶(𝑠𝐼 − 𝐴)−1𝐵 + 𝐷 (10)
El segundo término C(sI-A)-1x(0) es la respuesta de la condición inicial. Es parte de la respuesta, pero no de la función de transferencia. Además, si tomamos en cuenta que la condición inicial es x(0)=0, la ecuación anterior se reduce y se puede expresar solamente como una función de transferencia.
La función de transferencia tendrá dimensión 𝐺(𝑠) ∈ ℝ𝑝𝑥𝑚 de acuerdo con el número de entradas y salidas que tenga el sistema original expresado por las ecuaciones (1) y (2).


Comentarios
Publicar un comentario