4.4 Aplicación en la solución de problemas reales
4.4 Aplicación en la solución de problemas reales
Objetivo: Se busca que el compensador sintetizado sea de mínima ganancia por lo cual se aplicará para el diseño el método de la bisectriz.
Caso de estudio: se trabajará sobre la siguiente transferencia:
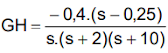
Los requerimientos sobre el sistema compensado son:
- Frecuencia natural de 2,828 rad/seg
- Relacion de amortiguamiento de 0,707
- Tiempo de establecimiento en 2 seg (criterio del 2%)

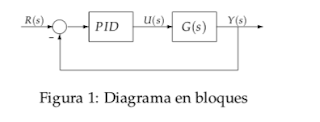
Realizando el lugar de raíces del sistema sin compensar (Figura 1), puede observarse que para que la traza de este lugar geométrico pase por la ubicación de los polos deseados falta agregar fase positiva. Para determinar exactamente cuanta fase debe aportar el compensador se calcula el aporte de fase del sistema sobre la ubicación deseada para los polos de lazo cerrado (-2+j2).

Dado que se pide que la ganancia del controlador sea mínima, se emplea el método
de la bisectriz. En la figura 3 se puede observar que el ángulo entre la recta horizontal y la que
une la ubicación del polo deseado con el origen forma 135°. Mientras no se supere ese valor,
se puede utilizar un único par polo/cero. Caso contrario debe utilizarse un compensador con
múltiples celdas polo-cero.

Gráficamente se puede deducir que las rectas que pasan por el punto -2+j2 y
conforman un ángulo de 50,335° (=100,67°/2) con la recta bisectriz, presentan ángulos con la
recta horizontal dados por:
67,5°- 50,335° = 17,165° y
67,5°+ 50,335° = 117,835°
Luego, dichas rectas aceptan las siguientes expresiones analíticas:

La intersección de estas rectas con el eje de abscisas se produce en:
Xp= -8,47 (polo del compensador)
Xz= -0,94 (cero del compensador)
Así, la expresión del compensador resulta:Falta determinar la ganancia para que los polos de lazo cerrado se posicionen sobre
los puntos deseados. Para ello se plantea que la ganancia del sistema sobre los puntos
especificados sea unitaria, es decir:
De esta ecuación se obtiene que k= 116

Anexo: aporte angular de una singularidad de no mínima fase en el lugar geométrico de raíces
En el ejercicio que se acaba de desarrollar se observa que, el ángulo correspondiente
al cero de NMF se ha medido desde el eje real positivo como cualquiera de los demás ángulos,
y el valor obtenido se lo ha considerado positivo como cualquier cero de fase mínima.
Habitualmente se presenta alguna confusión con los ángulos tomados en los diagramas de
lugar de raíces y el aporte en frecuencia (Bode) de singularidades de NMF. Sin embargo, a
pesar de lo que podría suponerse, no existen dos formas diferentes de medir los ángulos de
acuerdo al método que se utilice. Simplemente lo que sucede es que la escritura de
singularidades de NMF en el formato de Bode puede (de acuerdo a como esté escrita esa
singularidad) sacar un signo negativo como factor común. Este signo no se tiene en cuenta en
la conformación de los ángulos de las singularidades del LR, ya que aparece en la condición de
fase a cumplir (0º o 180º).
A fin de ejemplificar el procedimiento de medición de ángulos se presentan algunos
ejemplos sencillos: Ejemplo 1:
Un lugar de raíces clásico es el que representa una transferencia que posee sólo un
par de polos por todo conjunto de singularidades

¿Qué sucedería si uno de estos polos fuera de no mínima fase? Efectivamente el LR no cambia su forma, sólo su posición relativa al eje:

Referencias:
- Zujew, I. C. (2017). Compensación por adelanto. Cátedra de Control y servomecanismos.
- Kruger Terán, E. I. (1994). Análisis y diseño de sistemas de control multivariables en el dominio de la frecuencia (Bachelor's thesis, Quito: EPN, 1994.).


Comentarios
Publicar un comentario