3.5 Aplicaciones en la solución de problemas
Ejemplos de aplicaciones
Control de agua mediante
solenoide.
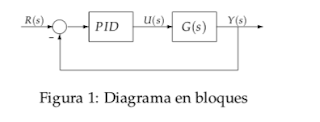
Para el sistema de control de
nivel que utiliza un solenoide, habrá que obtener la representación en bloques
del sistema, según se muestra en la figura

El nivel de referencia se
establece por medio de la varilla que sujeta al flotador en un extremo y, por
el otro, a un contacto metálico que actúa como interruptor eléctrico. De esta
manera, cuando el nivel es lo suficientemente bajo, el interruptor cierra el
circuito, lo que ocasiona que el solenoide se active, entonces la válvula se
abre y permite el paso del flujo de entrada para restablecer el nivel deseado.
El diagrama de bloques resultante se muestra en la siguiente figura.

Control de temperatura con
un termostato
Para un sistema de control
cuya finalidad es mantener constante la temperatura T de una habitación.
Determine la entrada y la salida del sistema. Los elementos de que consta el
sistema son un calentador y un termostato.

La entrada es la temperatura
de referencia, que se indica mediante la separación de los metales que
conforman el termostato y que con el tornillo de ajuste puede calibrarse de
acuerdo con las necesidades del usuario. La salida es la temperatura real de la
habitación.
Sistema
de posicionamiento de una plataforma.
El proceso por controlar es la
posición angular de la carga θ las distintas variables que intervienen en el
funcionamiento del sistema se muestran, analizar el comportamiento de la
configuración.

El proceso por controlar es la
posición de traslación x(t) de la plataforma de masa m, donde el engrane
movido por el motor hace contacto mecánico con la plataforma, de manera que se
lleva cabo una conversión de movimiento de rotación a traslación. El error "e" se amplifica "k" veces produciendo el voltaje "v".


Comentarios
Publicar un comentario