3.4 Controladores clásicos por realimentación
3.4 Controladores clásicos por realimentación
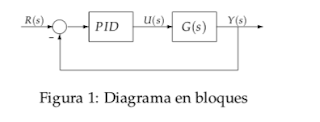
Para el estudio del control de procesos se comenzará explicando una de las más comunes y antiguas estrategias de control: El Control Feed-Back o por retroalimentación. En estos sistemas el controlador compara el valor de la variable controlada con su valor deseado y, en función del resultado de esta comparación, modifica la variable manipulada.
Los métodos clásicos de diseño no permiten especificar todos los polos a lazo cerrado de sistemas de orden superior a dos. Esto es porque al realimentar la salida no disponemos del número suficiente de grados de libertad (parámetros) para ubicar de manera independiente todos los polos a lazo cerrado.
Ejemplo de un sistema de control clásico de lazo cerrado
Para realizar el control en lazo cerrado, en primer lugar se deben transformar las variables físicas del sistema (en este caso, la temperatura) en señal eléctrica. Utilizaremos para ello un termopar, un transductor que nos transforma la variación de temperatura en señal eléctrica y lo introduciremos en el horno (ver figura). Posteriormente, la salida del termopar se compara (resta) con la temperatura de referencia. La señal resultante (+, -, 0) se amplifica para mover el eje el calentador. El diagrama de bloques nos muestra todos los elementos que forman el sistema de control en lazo cerrado.

 |
| Figura 2 Respuesta a un escalón unitario de una planta |
 |
| Figura 3 Curva de la respuesta de un sistema |
Figura 3. En este caso, la función de transferencia C(s)/U(s) se aproxima mediante un sistema de primer orden con un retardo del modo siguiente:

 |
| Tabla 1 Regla de sintonía de Ziegler-Nichols basada en la respuesta escalón de la planta (primer método). |

 |
| Figura 4 sistema de lazo cerrado con un controlador proporcional |
 |
| Figura 5 Oscilación sostenida con periodo Pcr (Pcr se mide en seg.). |
mente (véase la Figura 5). Ziegler-Nichols sugirieron que se establecieran los valores de los parámetros Kp, Ti y Td de acuerdo con la fórmula que se muestra en la Tabla 2.
 |
| Tabla 2 Regla de sintonía de Ziegler-Nichols basada en la ganancia crítica Kcr
y periodo crítico Pcr (segundo método). Obsérvese que el controlador PID sintonizado mediante el segundo método de las reglas de
Ziegler-Nichols produce  Por tanto, el controlador PID tiene un polo en el origen y un cero doble en s = .4/Pcr.
Conviene darse cuenta de que, si el sistema tiene un modelo matemático conocido (como
la función de transferencia), entonces se puede emplear el método del lugar de las raíces para
encontrar la ganancia crítica Kcr y las frecuencias de las oscilaciones sostenidas ωcr, donde
2π/ωcr=Pcr. Estos valores se pueden determinar a partir de los puntos de cruce de las ramas del
lugar de las raíces con el eje jω. (Obviamente, si las ramas del lugar de las raíces no cortan al eje
jω este método no se puede aplicar.) 3.4.2 Aplicación de las reglas de Ziegler-Nichols Ejemplo Sea el sistema de control que se muestra en la Figura 6, en el cual se usa un controlador PID para
controlar el sistema. El controlador PID tiene la función de transferencia  Aunque existen muchos métodos analíticos para el diseño de un controlador PID para este sistema,
se aplica la regla de sintonía de Ziegler-Nichols para la determinación de los valores de los parámetros Kp, Ti y Td. A continuación, obtenga una curva de respuesta escalón unitario y compruebe si
el sistema diseñado presenta una sobreelongación de aproximadamente el 25%. Si la sobreelongación es excesiva (40% o más), haga una sintonía fina y reduzca la cantidad de sobreelongación al
25% o menos. Como la planta tiene un integrador, se utiliza el segundo método de las reglas de sintonía de
Ziegler-Nichols. Fijando Ti = ∞ y Td = 0, se obtiene la función de transferencia en lazo cerrado
del modo siguiente:  |



o bien




 |
| Figura 7 Diagrama de bloques del sistema del PID |


Comentarios
Publicar un comentario