3.1 Definición de características de un controlador.
Características de un controlador
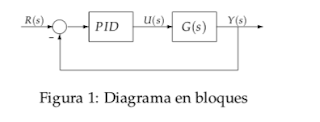
Los controladores son elementos que se le agregan al sistema original para mejorar sus características de funcionamiento, con el objetivo de satisfacer las especificaciones de diseño tanto en régimen transitorio como en estado estable.
Los sistemas
de control son aquellos dedicados a obtener la salida deseada de un sistema o
proceso. En un sistema general se tienen una serie de entradas que provienen
del sistema a controlar, llamado planta, y se diseña un sistema para que, a
partir de estas entradas, modifique ciertos parámetros en el sistema planta,
con lo que las señales anteriores volverán a su estado normal ante cualquier
variación.

Transformada de Laplace
Modelos matemáticos de sistemas físicos
3.2 Tipos de controladores.
La primera forma para modificar las características de respuesta de los sistemas es el ajuste de ganancia. Sin embargo, aunque por lo general el incremento en ganancia mejora el funcionamiento en estado estable, se produce una pobre respuesta en régimen transitorio y viceversa. Por tal motivo, es necesario agregar elementos a la simple variación de ganancia, lo cual da lugar a los diversos tipos de controladores:
- Control proporcional (P).
- Control integral (I).
- Control derivativo (D).
Además, los controladores pueden interactuar entre sí, lo que da por resultado la formación de las siguientes configuraciones:
- Control proporcional-integral (PI).
- Control proporcional-derivativo (PD).
- Control proporcional-integral-derivativo (PID).
Puesto que los controladores incorporan elementos adicionales al sistema a manera de polo(s) y/o cero(s), es importante establecer cuál es el efecto sobre el sistema a consecuencia de la adición de tales elementos.


Comentarios
Publicar un comentario