Investigación 1: Reseña del desarrollo de los sistemas de control a través de su historia.
En la actualidad, podemos utilizar los sistemas de control para un gran número de aplicaciones, de los cuáles conoceremos primero su historia y como se originaron como solución a diversas complicaciones que fueron surgiendo muchos años atrás. Las teorías de control que se usan habitualmente son la teoría de control clásica, la teoría de control moderna y la teoría de control robusto.
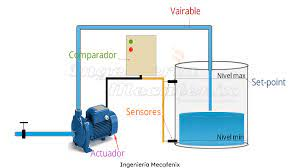 |
| Ilustración 1: ejemplo de sistema de control simple. |
Para la primera entrada, analizaremos principalmente la historia del control a través de los años, para de esta manera lograr un mejor entendimiento en lo que respecta a los sistemas de control, debido a que el control automático se ha convertido en una parte vital de los procesos modernos de fabricación.
Además, el control automático se ha convertido en parte importante e
integral de los procesos de manufactura e industriales modernos. Por ejemplo, el control
automático resulta esencial en operaciones industriales como el control de presión, temperatura,
humedad, viscosidad y flujo en las industrias de procesos, maquinado manejo y armado de
piezas mecánicas en las industrias de fabricación, entre muchas otras.
1.1.2 Primeros ejemplos históricos de sistemas de control.
Uno de los primeros sistemas de control fue el dispositivo de Herón para la apertura de puertas en
un templo en el siglo uno, como se visualiza en la ilustración. 2. La señal de mando del sistema fue
el encendido del fuego, el aire se calienta, dilatándose y produce el traslado del agua de un
tanque de depósito a una cuba. Al aumentar la cuba de peso, desciende y abre la puerta del altar
por medio de una cuerda, dando lugar a la subida de un contrapeso; la puerta puede cerrarse
apagando o atenuando el fuego. Al enfriarse el aire en el recipiente y reducirse su presión, el agua
de la cuba por efecto sifón, vuelve al depósito; así la cuba se hace más liviana y al ser mayor el
contrapeso se cierra la puerta. Esto tiene lugar siempre que la cuba esté más alta que el depósito.
 |
| Ilustración 2: Puerta de Herón. |
La idea de que un reloj de agua fuera capaz de realizar una función automática se le ocurrió al gran filosofo Platón. Los alumnos de la academia fundada por Platón en el 378 a.C. Tenían ciertas dificultades para levantarse por la mañana, lo cual era motivo de discusiones todos los días. Por lo cual Platón diseña un sistema de alarma basándose en una Clepsydra. En el vaso de la Clepsydra se ubicó un flotador encima del cual se depositan unas bolas. Durante la noche se llenaba el vaso y al amanecer alcanzaba su máximo nivel y las bolas caían sobre un plato de cobre. Es de suponer que ante el ruido de las bolas los “despiertos” alumnos terminarían por levantarse.
 |
| Ilustración 3: Reloj de Agua de Ktesibios, reconstruido por H. |
En la Clepsydra de la Ilustración 4, el caudal suministrado al depósito b es constante por lo cual este tardará en llenarse un tiempo determinado y fijo al final del cual las bolas caen sobre la bandeja ejerciendo la función de alarma.
 |
| Ilustración 4: Clepsydra alarma de Platón. |
 |
| Ilustración 5: Reloj de arena. |
Las Clepsydra de Platon suscitó un gran interés en la época y en el siglo siguiente se efectuaron gran cantidad de diseños de relojes de agua con dispositivos de señalización auditiva.
El primer trabajo significativo en control automático fue el regulador centrífugo de James Watt desarrollado en 1778, para el control de velocidad de una máquina de vapor, la Fig 2 muestra el dispositivo.
 |
| Ilustración 6: Regulador Centrifugo. |
Otras etapas relevantes en el del desarrollo de la teoría de control son debidas a Minorsky, Hazen y Nyquist entre muchos otros. En 1922 Minorsky trabajó en centrales automáticas de dirección en barcos y mostró como se podía determinar la estabilidad a partir de las ecuaciones diferenciales que describen el sistema. En 1932 Nyquist desarrolló un procedimiento relativamente simple para determinar la estabilidad de los sistemas de lazo cerrado sobre la base de la respuesta de lazo abierto con excitación senoidal en régimen permanente.
1.1.3 El problema de la estabilidad.
Al mismo tiempo que Watt se dedicaba a perfeccionar su regulador de bolas, Laplace y Fourier desarrollaban los métodos de Transformación Matemática, tan utilizados y asumidos en la Ingeniería Eléctrica y por supuesto en la actual Ingeniería de Control. Cauchy (1789-1857), con su teoría de la variable compleja, completo las bases matemáticas necesarias para la Ingeniería de Control. Pero hasta 75 años después de la muerte de Cauchy, no surgió lo que se podría denominar la Teoría de Control. Como se ha comentado anteriormente los primeros reguladores de Watt tenían un buen comportamiento debido al gran rozamiento existente entre sus miembros
1.1.4 Control clásico.
Hasta bien entrado el siglo XX las únicas herramientas que poseía el especialista del control eran la utilización de ecuaciones diferenciales ordinarias junto con criterios algebraicos para determinar la posición de las raíces de la ecuación característica asociada. Aplicando el criterio de Routh y Hurwitz el ingeniero determinaba la estabilidad o no de los sistemas, pero para esto se debía obtener el modelo matemático operando mediante ecuaciones diferenciales. Esto suponía un arduo trabajo. Además, hay que destacar que el criterio de Routhy Hurwitz no ofrece información de cómo mejorar la estabilidad del sistema. Desde el punto de vista teórico, la Ingeniería de Control se empieza a consolidar cuando se produce el traslado y aplicación de los conocimientos adquiridos en los problemas de amplificación de señales a los problemas de control industrial. Estos estudios desembocan en la llamada Teoría Clásica de Control, en la cual se utilizaban como herramientas matemáticas los métodos de Transformación de Laplace y Fourier y la descripción externa de los sistemas.
1.1.5 Control moderno.
(1957) USSR lanza su primer satélite orbital. También en la Unión Soviética se obtienen avances significativos en control no lineal.
(1893 -> 1960) Lyapunov - caracterización de la estabilidad de sistemas no lineales (1948), Ivachenko principios del control por relé.
(1960), Popov–Criterios de estabilidad para sistemas híbridos lineales-no lineales.
60’s –Extensiones al control no lineal: Zames, Narendra, Desoer.
Aplicación de estos resultados al estudio de la distorsión no lineal en lazos de control con restricciones, control de procesos no lineales, robótica…
Finales 60’s –70’s Primer microprocesador: La llegada de la era de la informática (1969) W. Hoff
70’s –hasta ahora La Teoría del control sigue creciendo. Aparecen nuevos problemas y retos: Control Robusto, Control Adaptativo, Control distribuido, a través de redes, etc.
Para conocer más acerca de la historia del control, anexamos videos informativos sobre el tema:
Bibliografía
1. Bolton, W. Mecatrónica. Sistemas de control electrónico en ingeniería mecánica y eléctrica. Segunda Ed. Alfaomega.
2. Eronini, Umez-Eronini, Dinámica de Sistemas y Control, Primera Edición,Thomson, México.
3. Ogata, Katsuhiko, Ingeniería de Control Moderna, Cuarta Edición, Prentice Hall,México.


Comentarios
Publicar un comentario